WMX ROS2 Documentation#
Welcome to the WMX ROS2 documentation. This project provides ROS2 packages for controlling robot platforms through the WMX motion control engine over EtherCAT. It targets industrial applications that require deterministic and high precision motion, such as semiconductor equipment, manufacturing automation, and precision robotics. The entire stack runs on a single industrial PC (IPC) or edge device with no separate motion controller. It combines perception and deterministic motion into edge physical AI so a machine can sense and act in the real world on one device. A Real-Time OS is required so that motion timing stays predictable under load.
WMX ROS2 integrates with widely used projects in the ROS2 ecosystem:
MoveIt2 for manipulator motion planning
NVIDIA Isaac Sim and Gazebo for simulation
NVIDIA Isaac ROS for GPU accelerated perception
YOLO for real time object detection
Intel OpenVINO for optimized inference on CPU and integrated accelerators
Multimodal large language models (LLMs) and vision language models (VLMs) for natural language task specification and high level reasoning
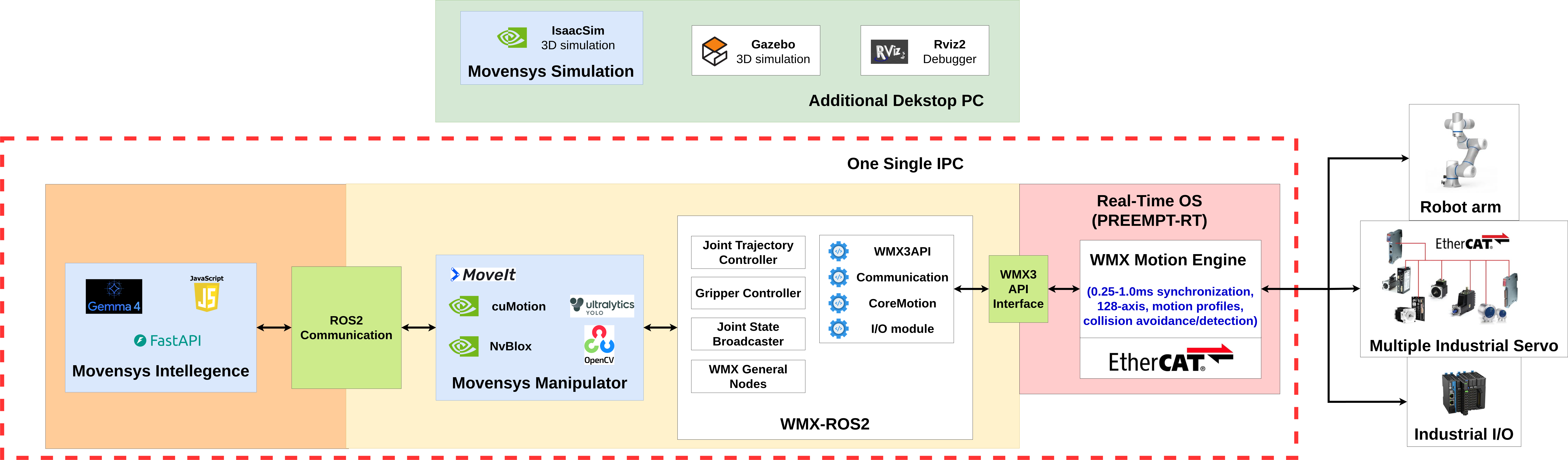
WMX ROS2 architecture overview.#
Why need a Real-Time OS?#
Servo drivers expect a command every fixed cycle. Standard Linux optimizes for throughput rather than keeping a strict deterministic schedule, so it may pause the program for a few milliseconds to handle a packet or a background task. That delay makes the next command arrive late and miss its cycle. A missed cycle makes motion stutter and drops accuracy, and on a production line it can even fault the drivers and stop the machine. A Real-Time OS such as Linux with the PREEMPT_RT patch guarantees motion threads run on time even under load, which is why every industrial motion stack runs on one.
Why WMX ROS2?#
A Real-Time OS covers the kernel-level guarantees, but ROS2 still leaves one step uncovered. A planner such as MoveIt2 or Nav2 produces a trajectory and ros2_control sends joint commands to the hardware. Those commands still need to become the precisely timed signals servo drivers execute on a fixed cycle. Most ROS2 setups bridge this execution gap with a closed industrial controller over TCP/IP, which adds latency the planner can never recover. The other common option sends raw EtherCAT commands and leaves smoothing and coordination to ROS2, which is not built for hard real-time work. Both approaches become the limiting factor once a line needs production-grade cycle accuracy. The WMX ROS2 package closes the gap by bringing the WMX motion control engine into ROS2, so the planner’s output runs as smooth and deterministic motion without leaving the ROS2 ecosystem.
What is WMX ROS2?#
WMX ROS2 is an open source MIT-licensed ROS2 package layer that owns the timing-sensitive step: smoothing trajectories, coordinating joints, and emitting commands at the rate servo drivers expect. It runs in simulation, in hardware-in-the-loop, and on real EtherCAT hardware across x86 industrial PCs and NVIDIA Jetson boards on a real-time Linux kernel (PREEMPT_RT). It also brings AI to the edge as physical AI, hosting workloads such as NVIDIA Isaac ROS, YOLO, Intel OpenVINO, and vision-language models on the same device that drives the servo. It is built on the WMX motion control engine, which keeps motion on a deterministic cycle and exposes more than 200 APIs for trajectory conversion, EtherCAT, I/O, and engine control. Proven over a decade in semiconductor, manufacturing, and precision robotics. WMX runs free in renewable 1-hour sessions that you extend by restarting the engine, and a commercial license removes the limit for production.
Where to go next#
Follow the Getting Started guide to set up the environment and run the package.
Work through the Example Applications to run trajectory, perception, and intelligence demos.
See Integration Scenarios for the supported motion-planning and application integrations.
Refer to the API Reference for ROS2 services, topics, and actions.
Consult Support for common issues and their resolutions.
- Getting Started
- Example Applications
- Integration Scenarios
- API Reference
- Support
- About Us