Getting Started#
This guide walks you through the complete setup — from system requirements to launching your first robot control session with WMX ROS2.
Follow the steps in order. At step 6 choose the path that matches your setup (simulation or physical robot).
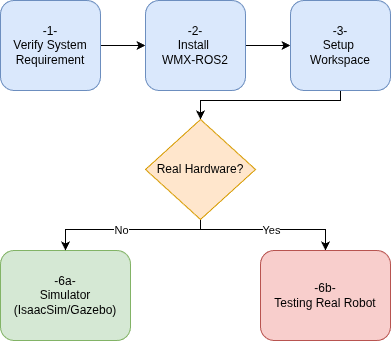
Getting Started — step-by-step flow#